Novel Omnidirectional Drive..!
- Gaurav

- Jul 31, 2017
- 2 min read
Updated: Aug 25, 2020
Traditional omnidirectional drives for robots do not provide uniform acceleration in all directions. In this project, my teammate and I designed and fabricated a novel drive, which overcomes this difficulty.

A robot with an omnidirectional drive can maneuver with complete freedom. In more technical terms, all the 3 planar degrees of freedom viz. x-component of velocity, y-component of velocity and the angular velocity, can be specified independently. Here's our drive demonstrating it:
Traditional omnidirectional drives are not truly omnidirectional, in that the maximum acceleration in each direction is not the same.
Our drive has uniform maximum acceleration in all directions.
Design
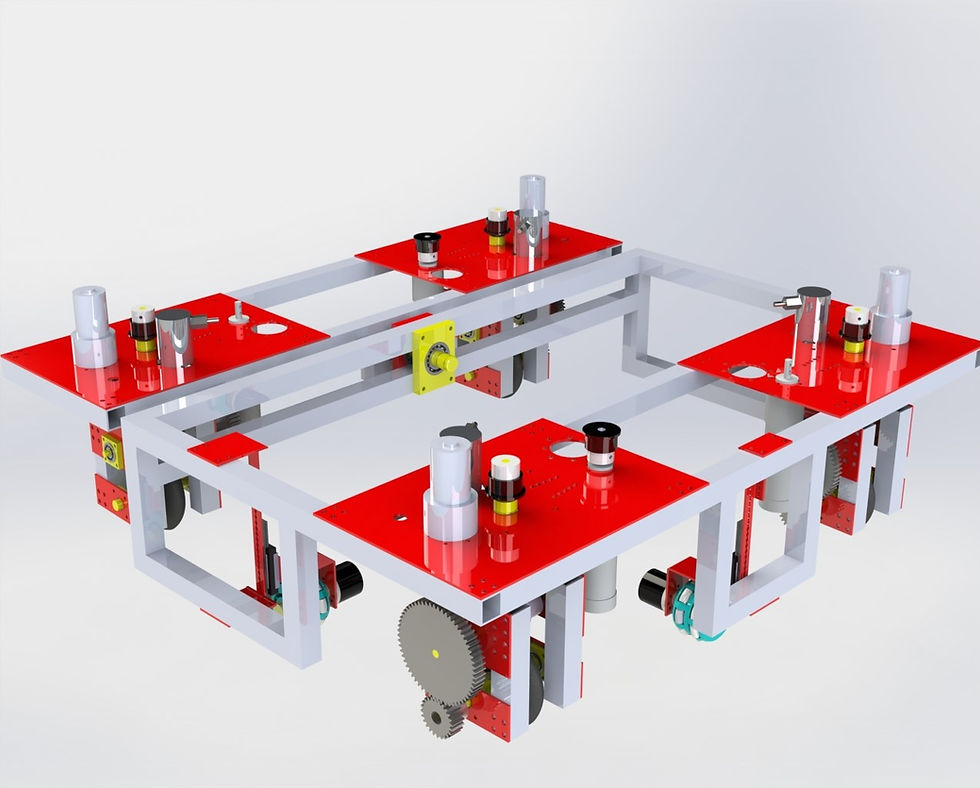
Salient features:
Four-wheel drive
Each wheel is driven independently
Orientation of each wheel is controlled independently
Modeling was done in SOLIDWORKS.
What is the novelty?
Such drives (with independent control over each wheel) are not new. However, generally the driving motor for the wheel, is mounted on the steering module which rotates to control the orientation of the wheel. Thus, the driving motor also rotates along with the steering module. The drawbacks of such a design are as follows:
Since the power and feedback cables of the driving motor are connected to the robot's frame, the steering module cannot necessarily take the shortest path to reach a particular angle.
Moreover, if by accident, the steering module starts spinning uncontrollably, the cables of the driving motor may get entangled and cause permanent damage.
Thus, the novelty in our design is that the driving motor is separate from the steering module.
Here's an animation which explains the design:
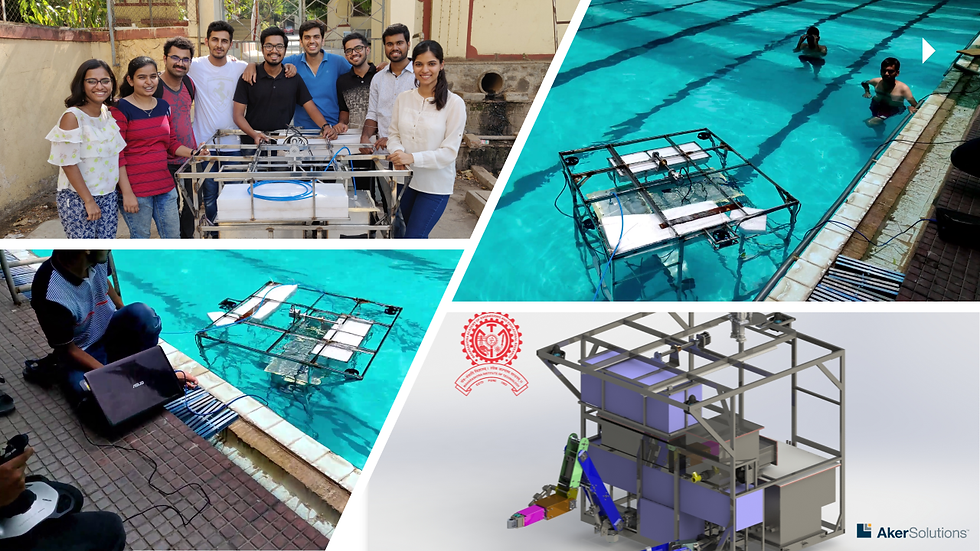
Fabrication
Here's a timelapse of the entire fabrication process:
Aluminum welding, milling, turning and laser cutting were the processes involved. Components such as timing belts, pulleys, gears and bearings were purchased.
The drive in action!


Comments