Underwater Remotely Operated Vehicle
- Gaurav

- Jun 1, 2019
- 2 min read
Updated: Aug 25, 2020
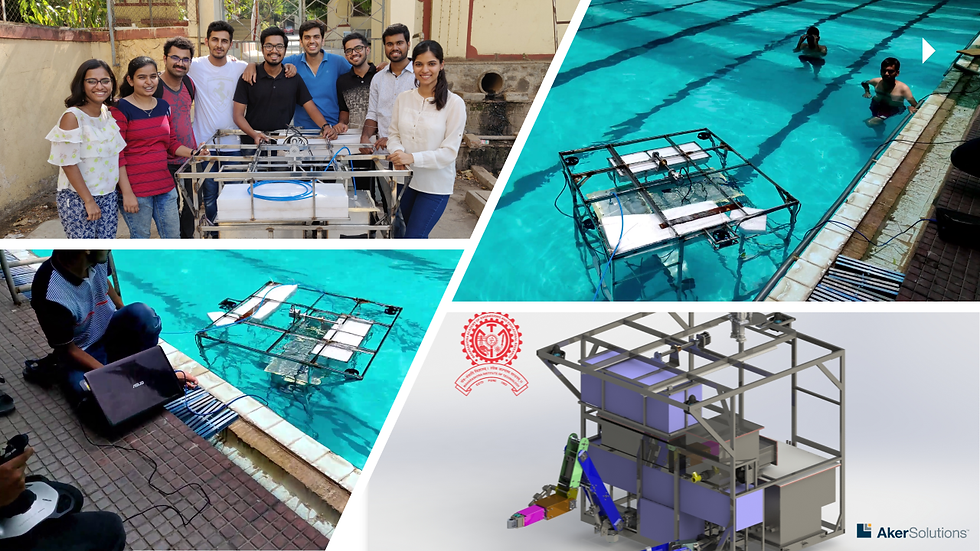
This was my bachelor's project in which I, along with 7 other budding mechanical engineers, designed and fabricated an Underwater Remotely Operated Vehicle (ROV). The project was funded by Aker Powergas Subsea Pvt. Ltd.
Background
Aker Solutions, under the CSR Act, took an initiative to build a state-of-the-art subsea laboratory on the MIT, Pune campus itself. The vision is to help students understand the structures and equipment commissioned at the sea bed and the various tasks that an ROV performs at the sea bed via a live demonstration in the laboratory.
As a partial fulfillment of the aforementioned overall project,
I worked in a 14 member interdisciplinary team of 8 mechanical & 6 electronics engineering students to build an underwater ROV.

The capabilities of the ROV are as follows:
Navigate in a fresh water tank of dimensions 10 X 10 X 3 m
Perform predefined tooling operations on the underwater equipment
Orientation-Stabilization during the tooling operations
My Problem Statement
The 8 member mechanical team was split into a 'Navigation Team' and 'Robotic-Arms Team'. I was a part of the Navigation Team with the following problem statement:
Design and fabricate the chassis of the ROV
Develop a navigation system which controls all 6 degrees of freedom
Develop a system which achieves neutral-buoyancy
Develop a balancing system that stabilizes the ROV during the operation of the robotic-arms
The ROV in action!
Here's an actual video of the ROV which demonstrates our solution to the above problem statement:
Our Design
Here's an animation which gives an overview of our design.
Modeling was done in SOLIDWORKS.
My specific contribution: A Novel Balancing System
Traditionally, the position of the centre of mass is controlled for the stabilization or balancing of underwater vehicles.
In our novel system, we control the position of the centre of buoyancy. This was found to be more efficient in terms of complexity and cost for the scale of our system.



Comments